Representation Stability under 3D Rotation in Message Passing Neural
Networks
Summary
This experiment examines the representation stability of graph neural
networks when subjected to 3D rotation of input data. Focusing on two
leading methods, E(n) Equivariant Graph Neural Networks and Message
Passing Neural Networks, we aim to discern their mechanisms in
updating node features of graphs embedded in 3D space. Using
undirected graphs from the ModelNet10 dataset, the study offers a
comprehensive analysis of each method's resilience and efficiency in
retaining essential information amid 3D rotational perturbations. The
conclusions underscore the importance of integrating geometric
relationships into edge attributes for improved representation
stability.
Introduction
We are processing undirected graphs $G = (V,E)$, consisting of nodes
$v_i \in V$ and edges $e_{ij} \in E$. Nodes are assigned features
$\mathbf{f}_i \in \mathbb{R}^{C_v}$ and edges are assigned attributes
$\mathbf{a}_{ij} \in \mathbb{R}^{C_e}$, where $C_v$ and $C_e$ stand
for the cardinality of features and attributes channel, respectively.
The nodes possess position vectors $\mathbf{x}_i \in \mathbb{R}^3$. We
follow the methods from
(A) and
(B). The
forward pass comprises two phases: the message passing phase and the
readout phase.
Message passing
Consider two nodes $v_i$ and $v_j$, their latent features
$\mathbf{h}_i$ and $\mathbf{h}_j$, and the attributes
$\mathbf{a}_{ij}$ of the edge that connects them. We update the node
features by first computing a message $\mathbf{m}_{ij}$ from $v_j$ to
$v_i$. The message function is expressed as: $$\mathbf{m}_{i
j}=\phi_m\left(\mathbf{h}_i, \mathbf{h}_j, \mathbf{a}_{i j}\right) ,$$
whereby, in Method B, the message function is extended such that,
aside the edge attribute, it involves the Euclidean distance:
$$\mathbf{m}_{ij}=\phi_m(\mathbf{h}_i,
\mathbf{h}_j,||\mathbf{r}_{ij}||^2, a_{i j}).$$ However, for the
purposes of this experiment, we will disregard the scalar attribute
$a_{i j}$. The message update function $\phi_m$ is directly
parameterised by an MLP, i.e., it does not output a matrix that is
used to linearly transform the node features but directly computes
messages in a nonlinear way. Thus, the messages are nonlinear
transformations conditioned on the edge attribute. Note that by
conditioning the messages only on the Euclidean distance in Method B,
$G$-mapping is guaranteed. Notably, Method B extends message passing
such that also the node positions become updatable: \begin{equation}
\label{eq:egnn-node-pos-update} \mathbf{x}^{\prime}_i=\mathbf{x}_i +
\sum_{j\in N_i}(\mathbf{r}_{ij})\phi_p(\mathbf{m}_{ij}) \end{equation}
The position function $\phi_p$ gives a scalar which weighs the amount
by which $\mathbf{x}_i$ is translated in the direction of the
neighbors or in the opposite direction. This is done in a
$G$-equivariant way. Since the position function $\phi_p$ is
conditioned on the distance between the node and its neighbors,
$\sum_{j \in N} (\mathbf{r}_{ij})$, it is invariant; i.e., since the
function gives a scalar, the attributes are invariant. However, the
method learns the weights which determine the amount of influence
nodes have on each other. Due to this, it allows for more adaptation
and flexibility than the basic message passing. While both Method A
and Method B preserve preserve permutation $G$-mapping on the set of
nodes $V$ in the same way as standard GNNs do, Method B preserves
rotation and translation $G$-mapping on the set of coordinates
$\mathbf{x}_i$. Equation \ref{eq:egnn-node-pos-update} is the main
difference of this method compared to standard GNNs and it is the
reason why translation, rotation, and reflection $G$-mapping is
preserved. However still, the messages are obtained via invariant
attributes $\|\mathbf{r}_{ij}\|^2$, which are limiting despite
ensuring a $G$-map. The next step in both methods is to aggregate the
computed messages via a permutation-invariant function. Permutation
invariance is needed because the way the messages are indexed, just
like the way nodes are indexed, meaning the order, should not
influence the results. We use sum pooling. The aggregated message
$\mathbf{m}_i = \sum_{j \in N_i} \mathbf{m}_{i j}$ is a vector that is
used to obtain an updated node representation:
$$\mathbf{h}_i^{\prime}=\phi_h \left(\mathbf{h}_i, \sum_{j \in N_i}
\mathbf{m}_{i j}\right) ,$$ where $\phi_h$ is a node update function
imlemented as an MLP, whose input are the current node features
$\mathbf{h}_i$ and the aggregated message $\mathbf{m}_i$.
Readout
We perform a graph-level classification task on the dataset. To obtain
a graph-level embedding, we apply a permutation-invariant aggregation
of all the nodes' features: $$\hat{y} = \sum_{v \in
V}(\{\mathbf{h}^T_v\}) ,$$ where $T$ denotes the step after the last
message passing layer.
Dataset and input representation
ModelNet10 dataset
contains 4,899 3D
models (meshes) representing an object from 10 classes. We processed
the meshes to form graphs embedded in $\mathbb{R}^3$. Nodes form an
$8\times8\times8$ regular grid. The edges are inferred by connecting
nodes within a pre-set maximum radius value. The nodes are assigned
one-dimensional feature vectors, representing the Euclidean distance
to the closest point on the surface of the initial mesh. The three
variants of Method A pose different demands on edge attributes. In the
first, edges have no attributes. In the second, Euclidean distance
between connected nodes forms attributes. In the third, attributes are
formed by computing relative Cartesian coordinates of connected nodes.
Each graph is assigned a one-dimensional feature vector representing
the object class. We sampled 3.991 graphs for training and 908 for
validation.
Training
Batch size is set to 64; the number of message-passing layers to 2;
the number of hidden features to 256; and the learning rate to
$3e^{-4}$. Number of epochs is set to 50. SGD uses the ADAM optimiser.
Parameter total is 923 K (Method A) and 1.1 M (Method B).
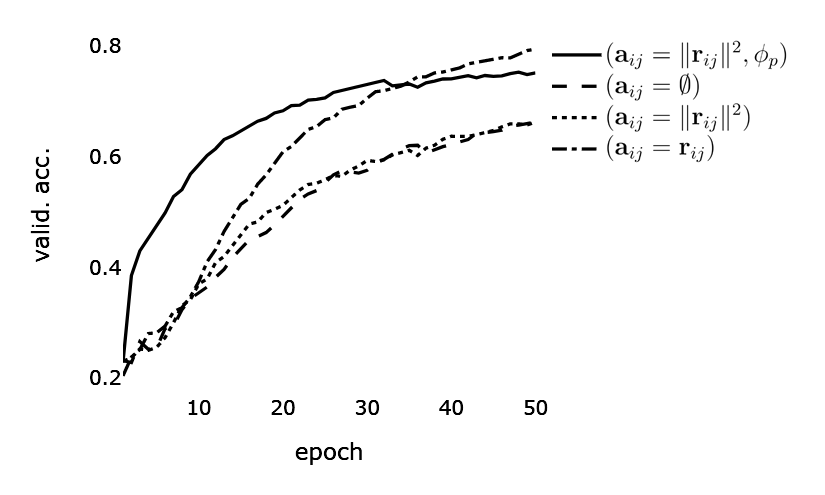
Results
Training performance comparison. Method A with edge attributes
$\mathbf{a}_{ij} = \emptyset$, $\mathbf{a}_{ij} =
\|\mathbf{r}_{ij}\|^2$, and $\mathbf{a}_{ij} = \mathbf{r}_{ij}$.
Method B with edge attributes $\mathbf{a}_{ij} =
\|\mathbf{r}_{ij}\|^2$ and node position update function $\phi_p$.
Method A that does not use edge attributes ($\mathbf{a}_{ij} =
\emptyset$) and therefore, it disregards any information the edges may
carry, beyond connectivity. It is ignorant of the geometric structure
between the nodes and its message passing scheme utilises the node
feature vectors. Applying different rotations to the input graph gives
the same latent representations. Another model following the Method A
has the geometric quantity of Euclidean distance injected into the
edge attributes, $\mathbf{a}_{ij} = \|\mathbf{r}_{ij}\|^2$. The
representations learned with this rotation-invariant model do not
change under the rotation of the input representations. Rotation
invariance stems from the norm in the edge attribute definition being
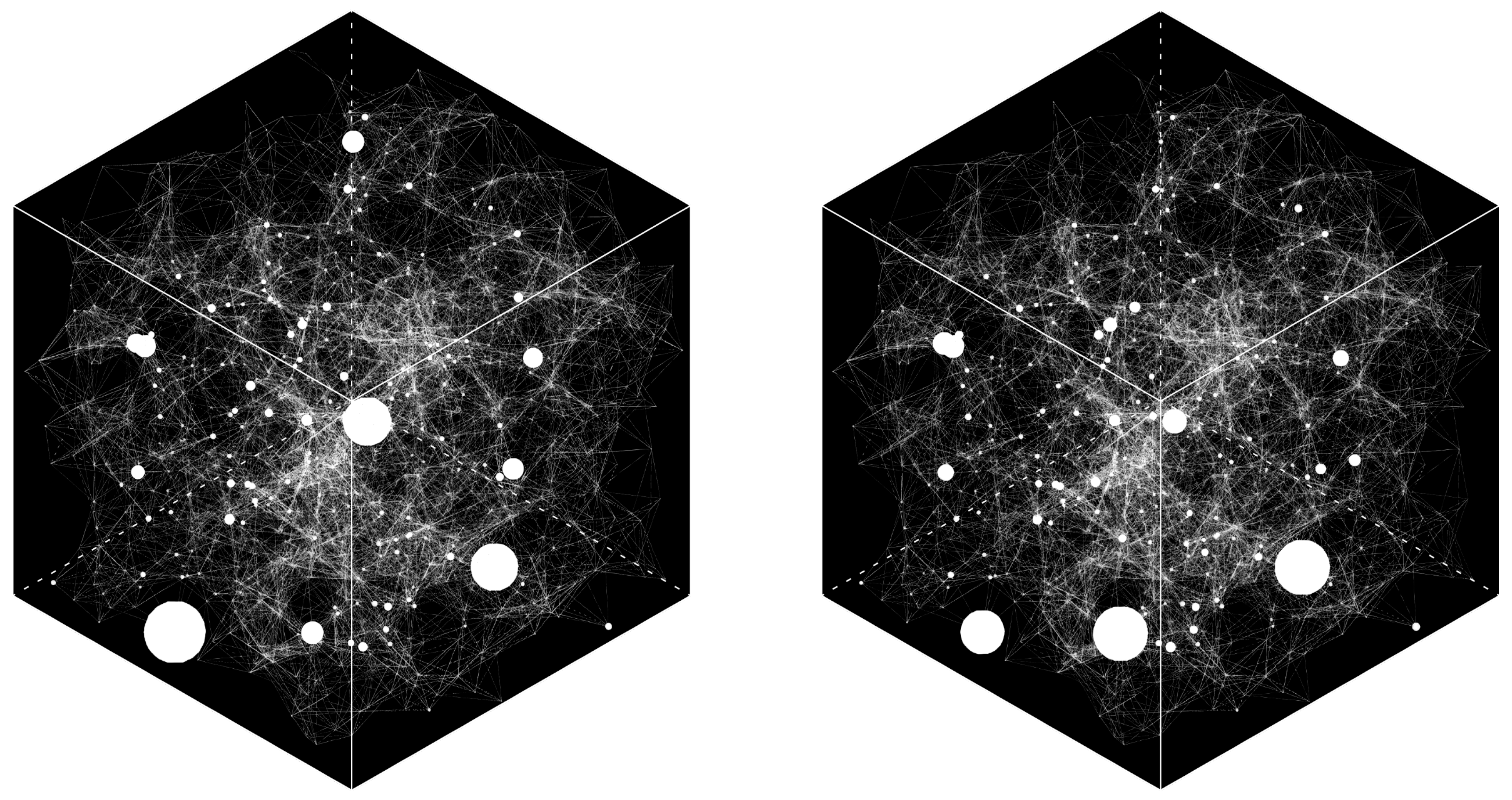
invariant to rotations. Last model following the Method A has relative
Cartesian coordinates as attributes, $\mathbf{a}_{ij} =
\mathbf{r}_{ij}$. Here, latent representations show instability under
rotation. The definition of edge attribute here as the distance
between two nodes, $\mathbf{r}_{ij}$, does guarantee translation but
not rotation $G$-mapping. See Figure for
a visualisation.
Hidden representations of the model before pooling, using relative
Cartesian coordinates as edge attributes. The disk radius reflects
the first node feature value. For the input representation, 1,500
points per 3D model randomly sampled from the embedding space
$\mathbb{R}^3$. Two scenarios are shown: (left) with an applied
rotation of $ \theta = 0^{\circ} $ and (right) with $ \theta =
180^{\circ} $. The input representation for this visualisation
differs from the others in the experiment solely in the
pre-processing involving random sampling.
Next, we compare Method B with the three variants of Method A,
presented in the Table. Method B
is outperformed only by Method A variant with relative Cartesian
coordinates as edge attributes. However, in the second part of the
experiment, where we apply a random rotation to the input, its
accuracy decreases significantly. This is expected, since relative
Cartesian coordinates are not invariant to rotation. The other two
variants of Method A (no edge attributes and Euclidean distance) fall
behind all the others in the first part of the experiment. Since they
do not involve information on the direction that the messages come
from, the accuracy is unchanged with the transformed input; they are
invariant to rotation. Finally, we observe the stability under
rotation with Method B and the higher accuracy relative to the
rotation-invariant models.
Method
ACC(a)
ACC(b)
A ($\mathbf{a}_{ij} = \emptyset$)
.6398
.6398
A ($\mathbf{a}_{ij} = \|\mathbf{r}_{ij}\|^2$)
.6861
.6861
A ($\mathbf{a}_{ij} = \mathbf{r}_{ij}$)
.8061
.3876
B ($\mathbf{a}_{ij} = \|\mathbf{r}_{ij}\|^2, \phi_p$)
.7643
.7643
Comparison of feature stability under rotation across message
passing model variants. ACC (a): validation accuracy; ACC (b):
Random rotation test accuracy.
References
Justin Gilmer, Samuel S. Schoenholz, Patrick F. Riley, Oriol
Vinyals, George E. Dahl.
"Neural Message Passing for Quantum Chemistry". Proceedings of the 34th International Conference on Machine
Learning, 2017. pp. 1263-1272.